Object Detection
Introduction to Image Datasets, Object Detection, Object Tracking, and its Applications.
Image Datasets
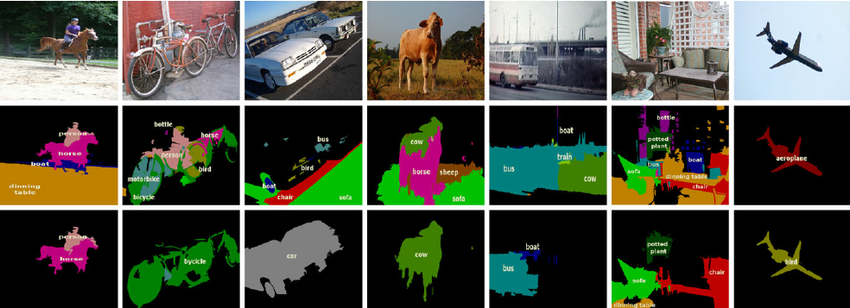
PASCAL VOC
VOC2007: 20 classes. The train/val/test 9,963 images containiing 24,640 annotated objects
VOC2012: 20 classes. The train/val data has 11,530 images containing 27,450 ROI annotated objects and 6,929 segmentations
from torchbench.semantic_segmentation import PASCALVOC
from torchvision.models.segmentation import fcn_resnet101
model = fcn_resnet101(num_classes=21, pretrained=True)
PASCALVOC.benchmark(model=model,
paper_model_name='FCN ResNet-101',
paper_arxiv_id='1605.06211')
COCO Dataset
330K images (>200K labels), 1.5million object instances,80 object categories
ImageNet
1000 object classes and contains 1,281,167 training images, 50,000 validation images and 100,000 test images.
Open Images Dateset
Open Images Dataset V6+:
These annotation files cover the 600 boxable object classes, and span the 1,743,042 training images where we annotated bounding boxes, object segmentations, visual relationships, and localized narratives; as well as the full validation (41,620 images) and test (125,436 images) sets.

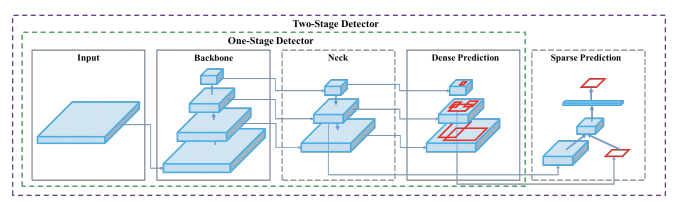
Object Detection
Object Detection Milestones
Object Detection Landscape
Blog: The Object Detection Landscape: Accuracy vs Runtime
R-CNN, Fast R-CNN, Faster R-CNN
Blog: 目標檢測

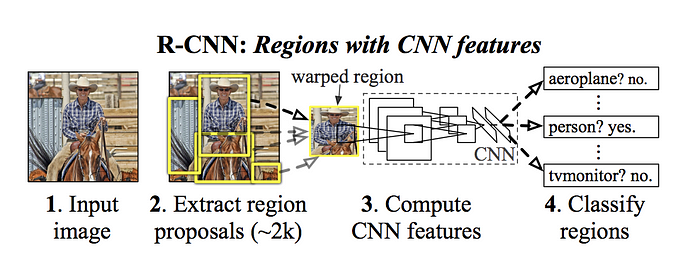
- R-CNN首先使用Selective search提取region proposals(候選框);然後用Deep Net(Conv layers)進行特徵提取;最後對候選框類別分別採用SVM進行類別分類,採用迴歸對bounding box進行調整。其中每一步都是獨立的。
- Fast R-CNN在R-CNN的基礎上,提出了多任務損失(Multi-task Loss), 將分類和bounding box迴歸作爲一個整體任務進行學習;另外,通過ROI Projection可以將Selective Search提取出的ROI區域(即:候選框Region Proposals)映射到原始圖像對應的Feature Map上,減少了計算量和存儲量,極大的提高了訓練速度和測試速度。
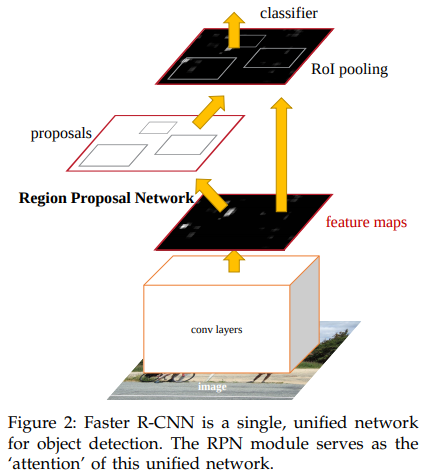
- Faster R-CNN則是在Fast R-CNN的基礎上,提出了RPN網絡用來生成Region Proposals。通過網絡共享將提取候選框與目標檢測結合成一個整體進行訓練,替換了Fast R-CNN中使用Selective Search進行提取候選框的方法,提高了測試過程的速度。
R-CNN
Paper: arxiv.org/abs/1311.2524
Fast R-CNN
Paper: arxiv.org/abs/1504.08083
Github: faster-rcnn

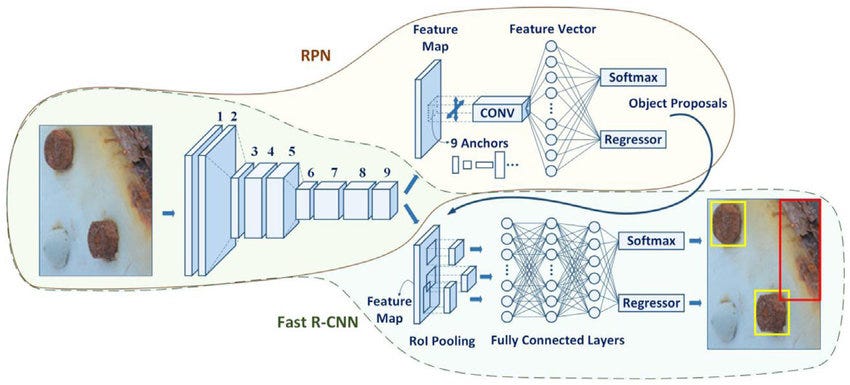
Faster R-CNN
Paper: arxiv.org/abs/1506.01497
Github: faster_rcnn, py-faster-rcnn
Blog: [物件偵測] S3: Faster R-CNN 簡介
- RPN是一個要提出proposals的小model,而這個小model需要我們先訂出不同尺度、比例的proposal的邊界匡的雛形。而這些雛形就叫做anchor。
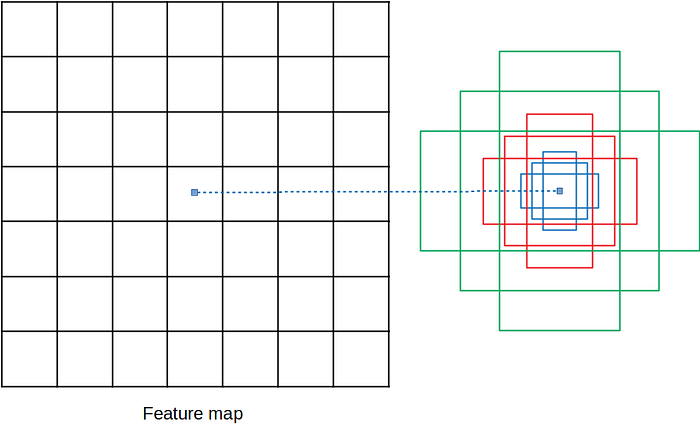
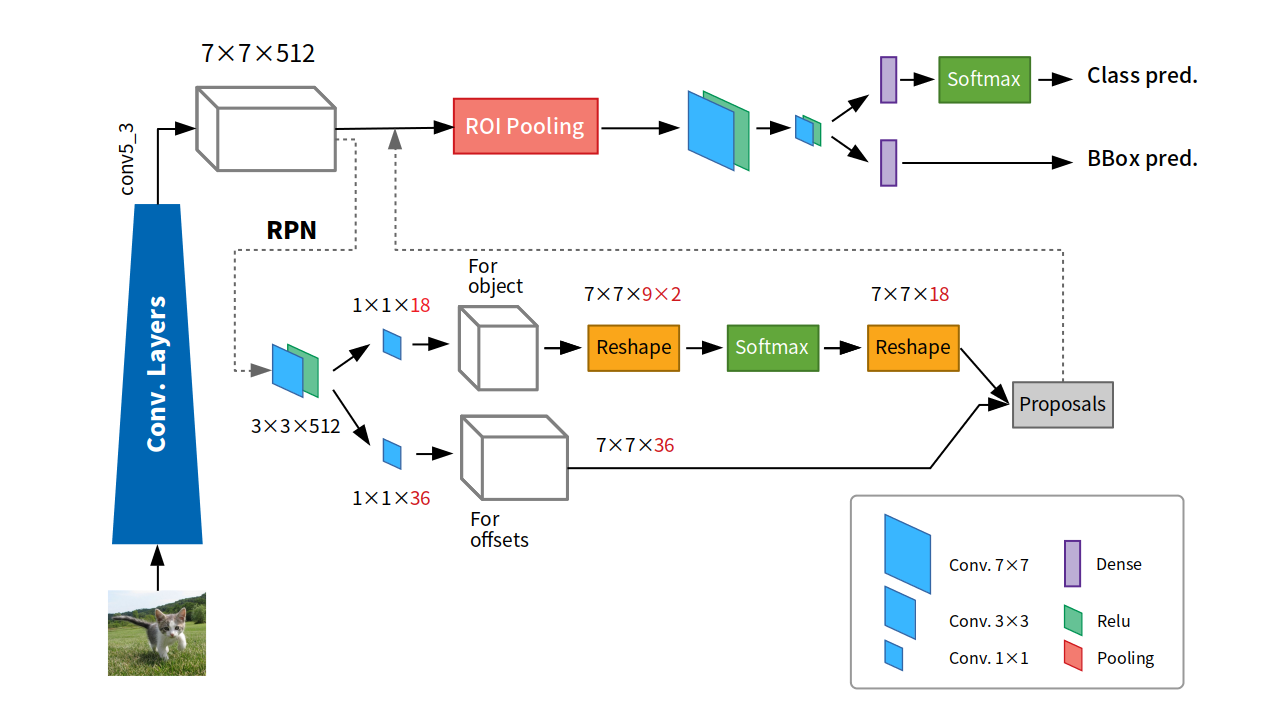
- RPN的上路是負責判斷anchor之中有無包含物體的機率,因此,1×1的卷積深度就是9種anchor,乘上有無2種情況,得18。而下路則是負責判斷anchor的x, y, w, h與ground truth的偏差量(offsets),因此9種anchor,乘上4個偏差量(dx, dy, dw, dh),得卷積深度為36。
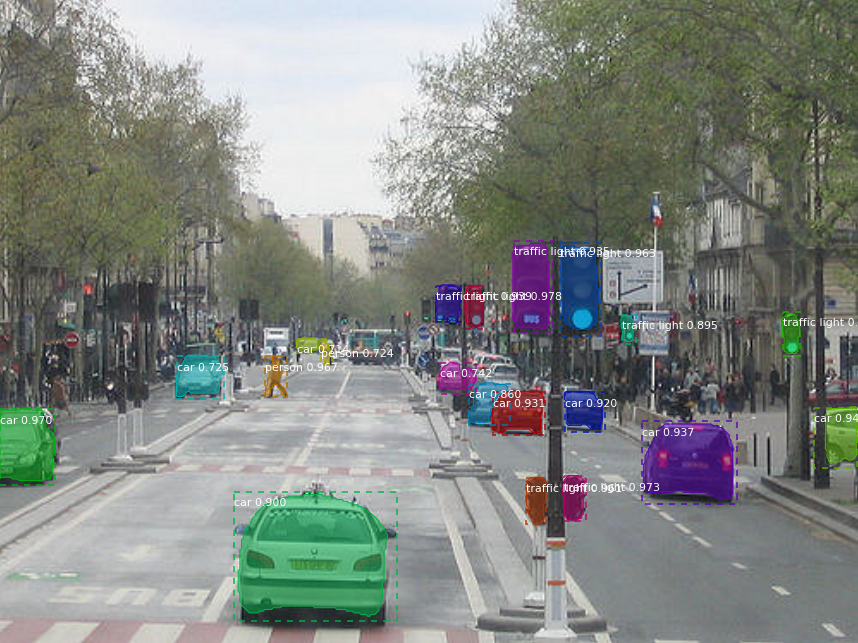
Mask R-CNN
Paper: arxiv.org/abs/1703.06870

Blog: [物件偵測] S9: Mask R-CNN 簡介
Code: matterport/Mask_RCNN


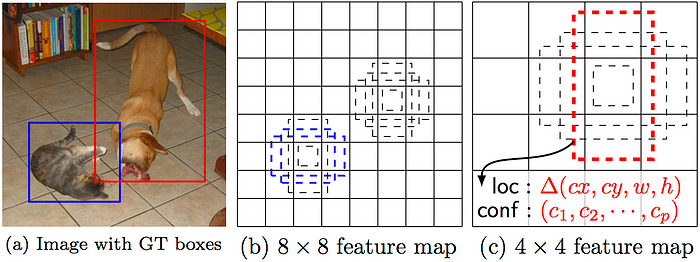
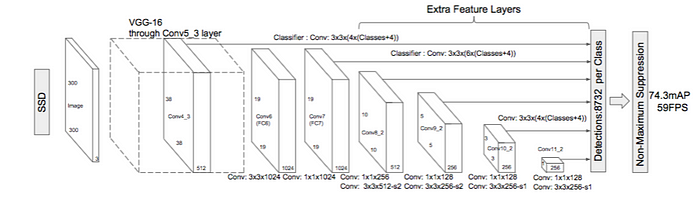
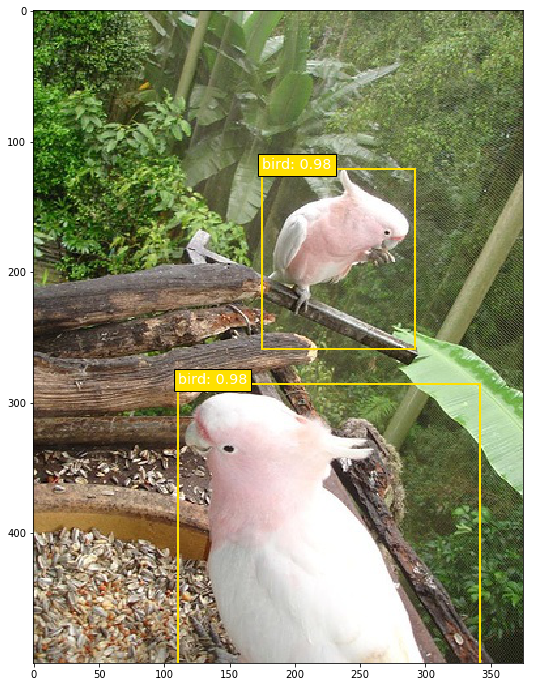
SSD: Single Shot MultiBox Detector
Paper: arxiv.org/abs/1512.02325
Blog: Understanding SSD MultiBox — Real-Time Object Detection In Deep Learning
 使用神經網絡(VGG-16)提取feature map後進行分類和回歸來檢測目標物體。
使用神經網絡(VGG-16)提取feature map後進行分類和回歸來檢測目標物體。
 Code: pierluigiferrari/ssd_keras
Code: pierluigiferrari/ssd_keras
 |
 |
 |
 |
RetinaNet
Paper: Focal Loss for Dense Object Detection
Blog: RetinaNet 介紹
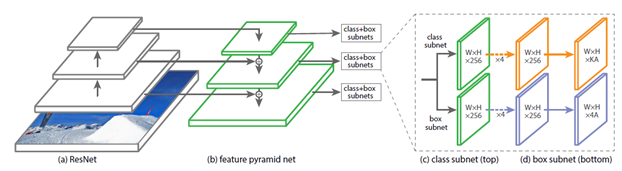 從左到右分別用上了
從左到右分別用上了
- 殘差網路(Residual Network ResNet)
- 特徵金字塔(Feature Pyramid Network FPN)
- 類別子網路(Class Subnet)
- 框子網路(Box Subnet)
- 以及Anchors
Blog: Review: RetinaNet — Focal Loss

Code: keras-retinanet
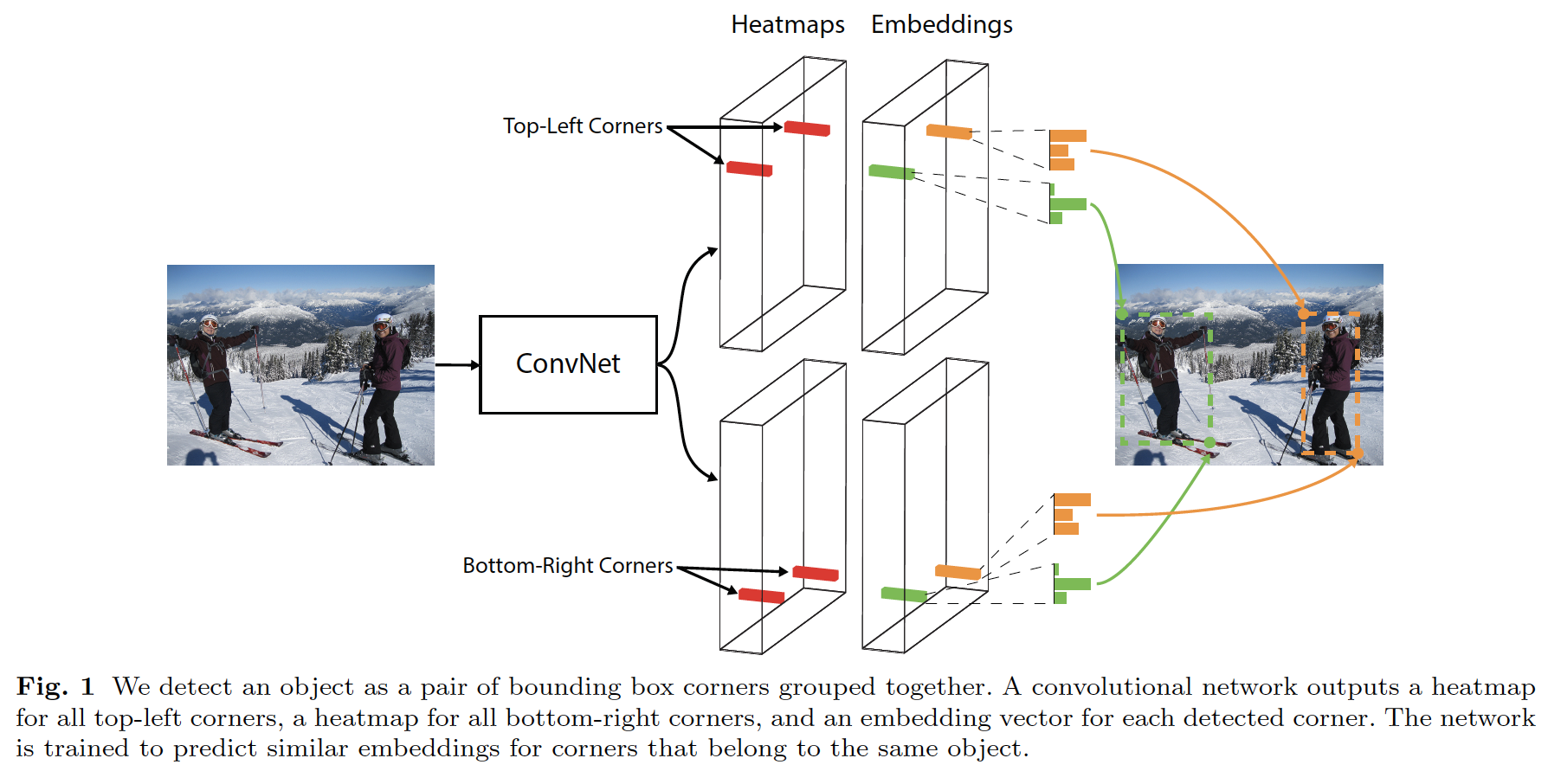
CornerNet
Paper: CornerNet: Detecting Objects as Paired Keypoints
 Code: princeton-vl/CornerNet
Code: princeton-vl/CornerNet
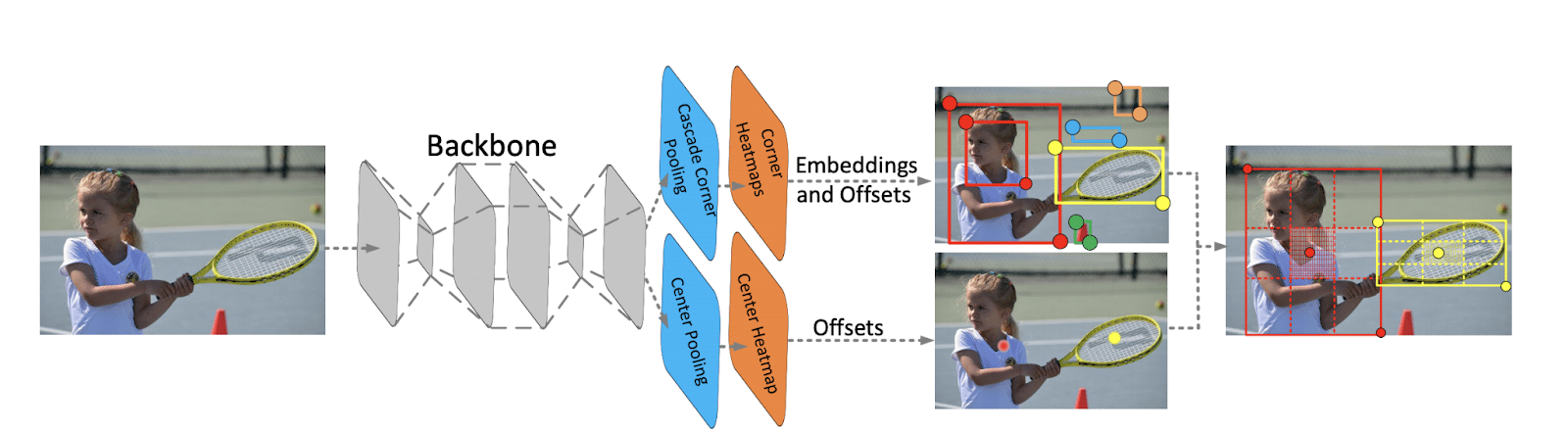
CenterNet
Paper: CenterNet: Keypoint Triplets for Object Detection
 Code: xingyizhou/CenterNet
Code: xingyizhou/CenterNet
EfficientDet
Paper: arxiv.org/abs/1911.09070
 Code: google efficientdet
Code: google efficientdet

 |
 |
Kaggle: rkuo2000/efficientdet-gwd
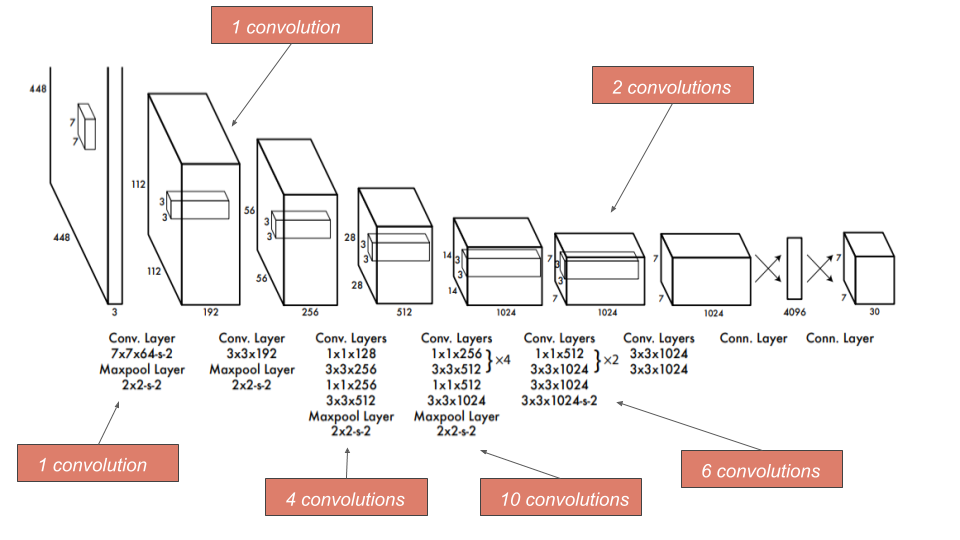
YOLO- You Only Look Once
Code: pjreddie/darknet
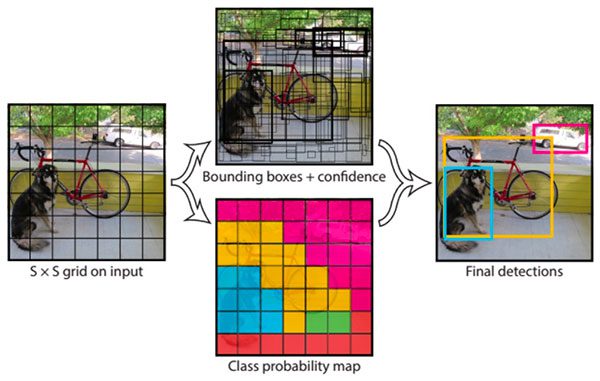
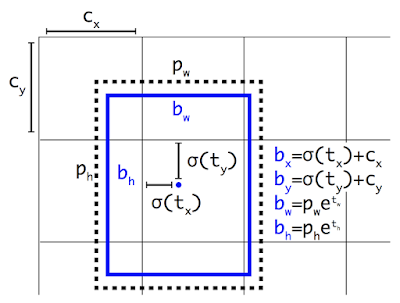
YOLOv1 : mapping bounding box
 YOLOv2 : anchor box proportional to K-means
YOLOv2 : anchor box proportional to K-means
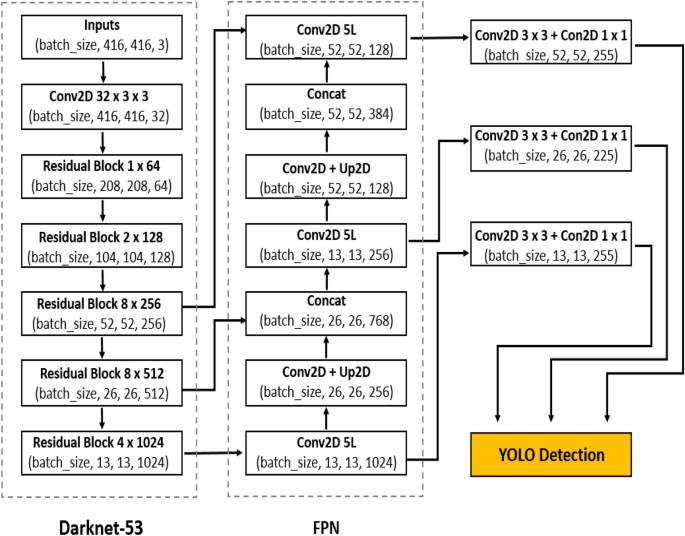
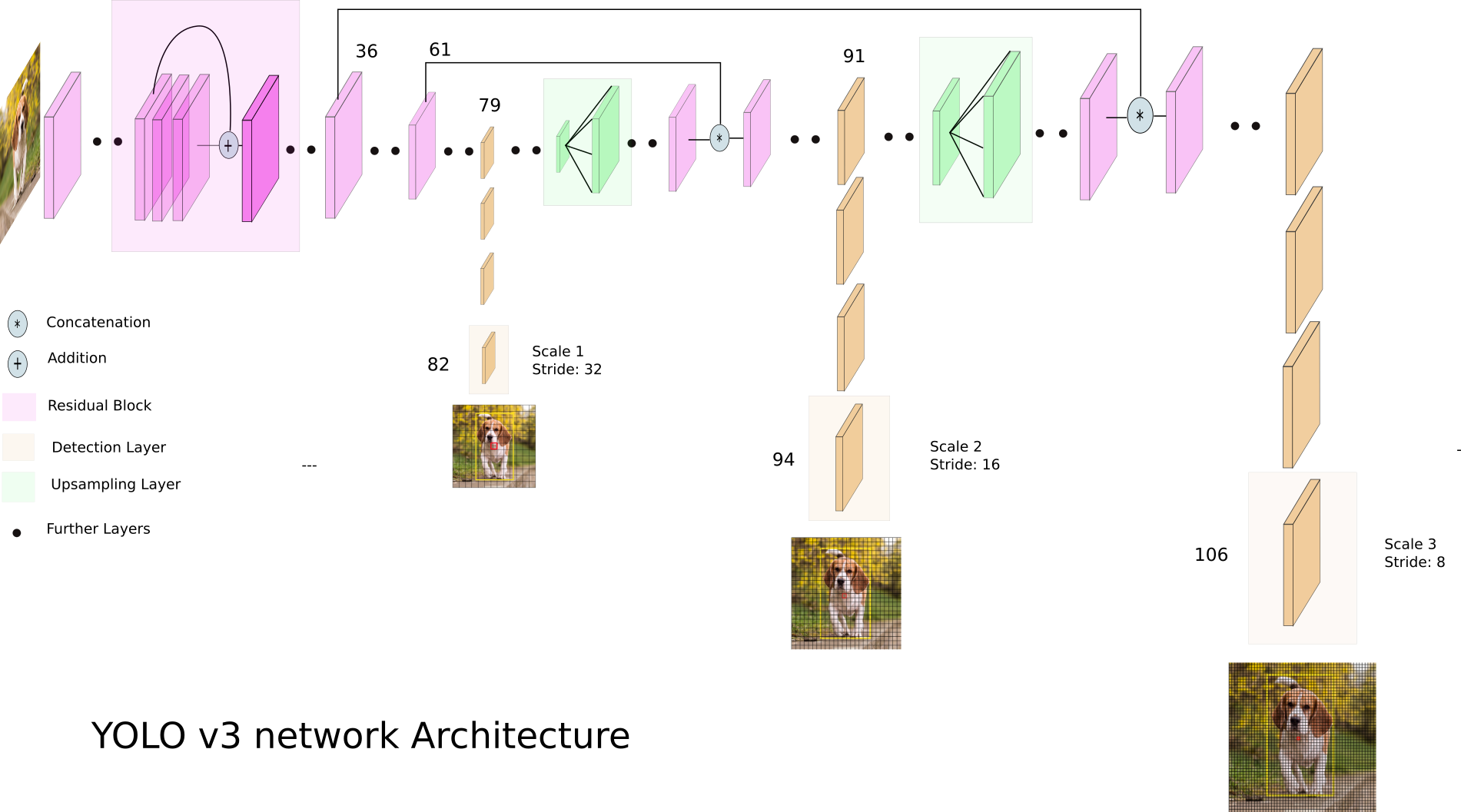
 YOLOv3 : Darknet-53 + FPN
YOLOv3 : Darknet-53 + FPN
YOLObile
Paper: arxiv.org/abs/2009.05697
Blog: YOLObile:移動設備上的實時目標檢測
 Code: nightsnack/YOLObile
Code: nightsnack/YOLObile

YOLOv4
Paper: YOLOv4: Optimal Speed and Accuracy of Object Detection
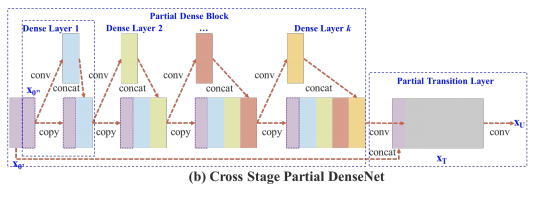
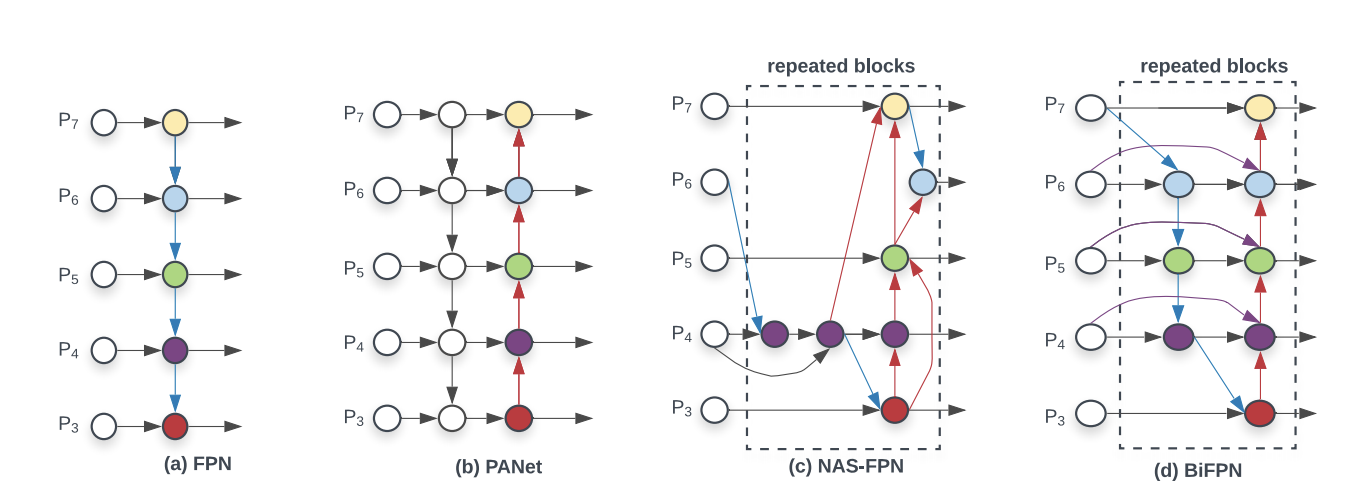
- YOLOv4 = YOLOv3 + CSPDarknet53 + SPP + PAN + BoF + BoS
- CSP
- PANet
Code: AlexeyAB/darknet
Code: WongKinYiu/PyTorch_YOLOv4
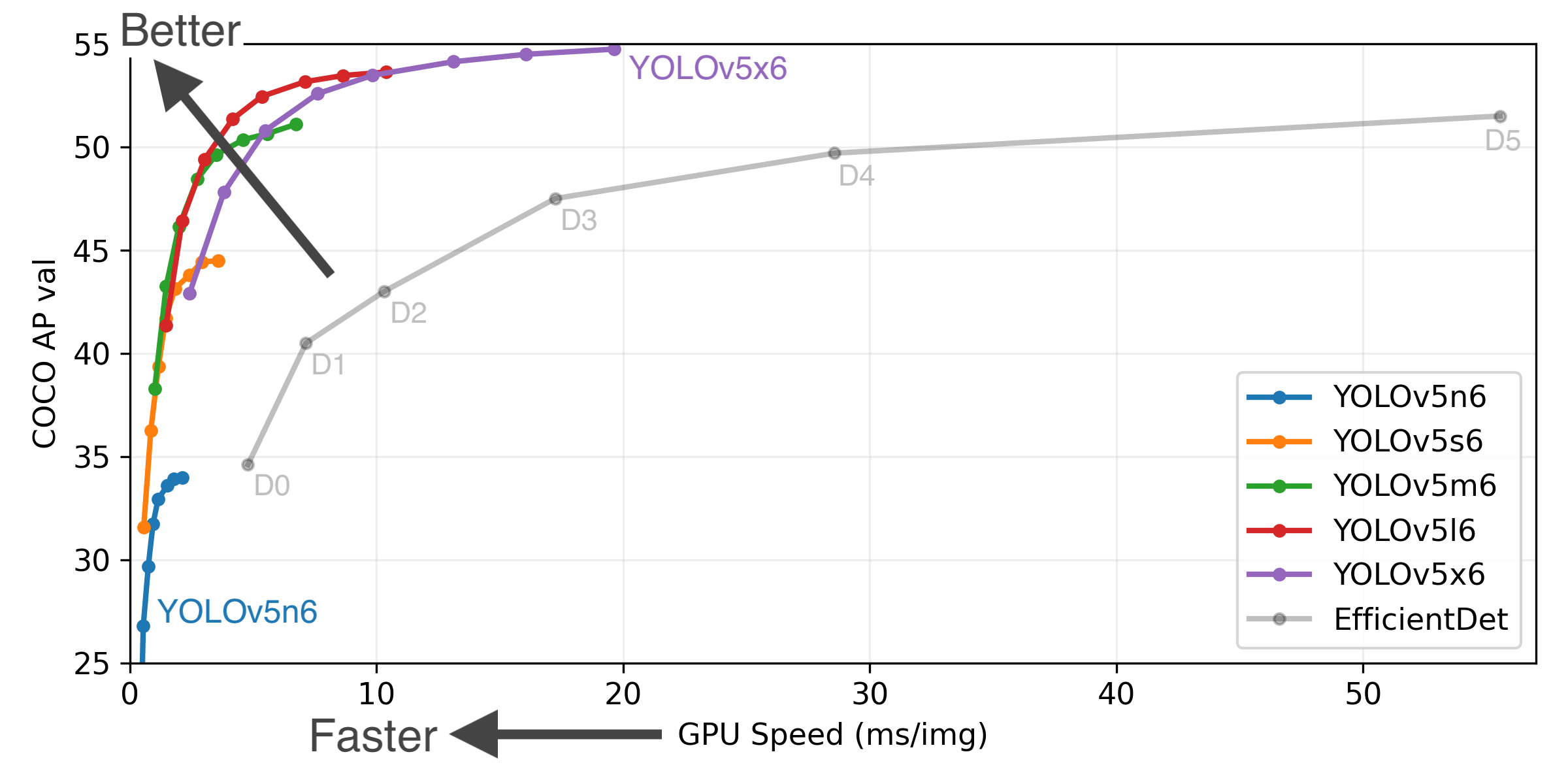
YOLOv5
 Code: ultralytics/yolov5/
Code: ultralytics/yolov5/

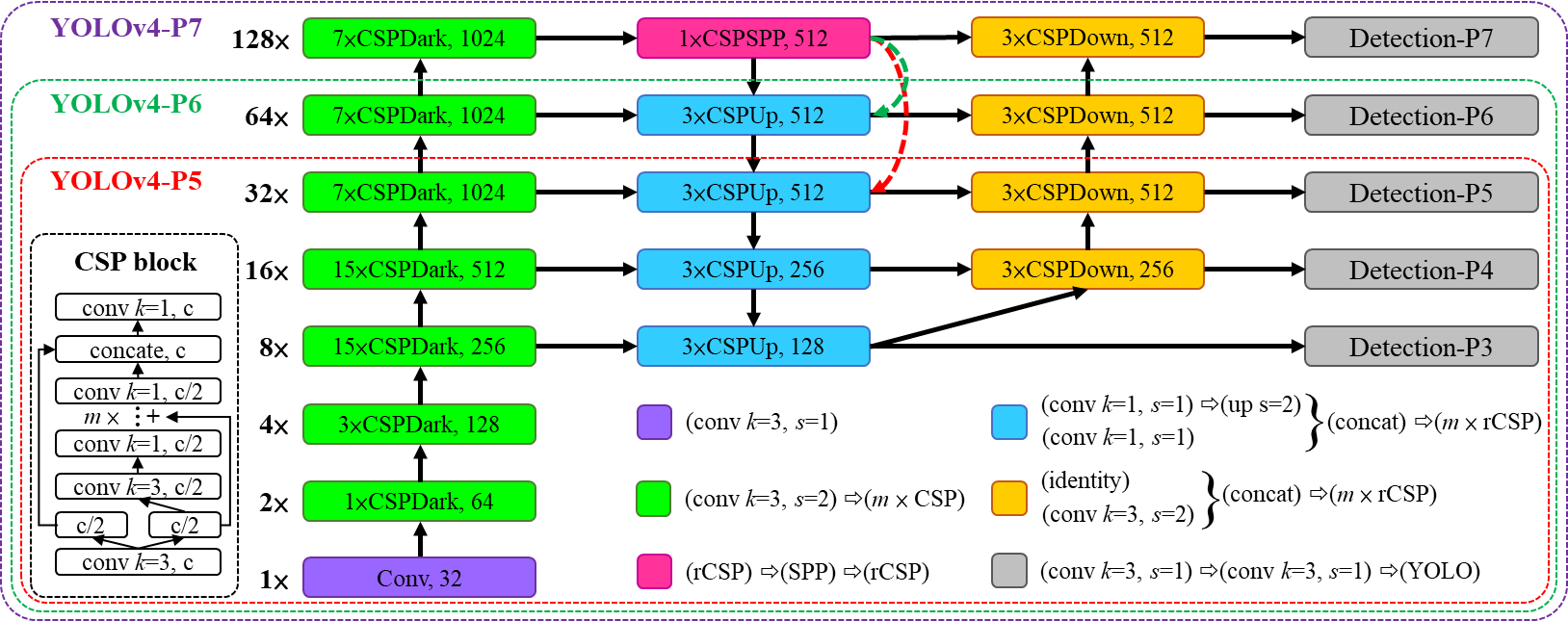
Scaled-YOLOv4
Paper: arxiv.org/abs/2011.08036
 Code: WongKinYiu/ScaledYOLOv4
Code: WongKinYiu/ScaledYOLOv4
YOLOR : You Only Learn One Representation
Paper: arxiv.org/abs/2105.04206
 Code: WongKinYiu/yolor
Code: WongKinYiu/yolor


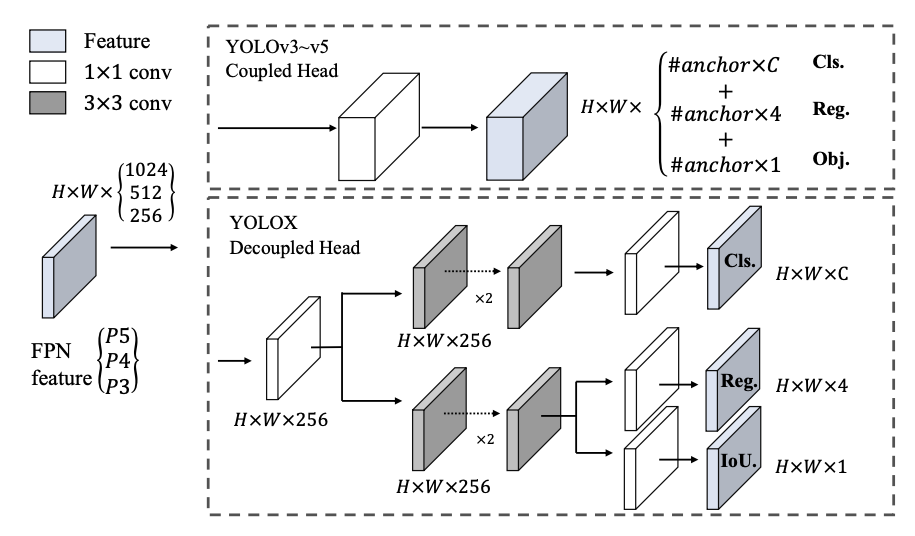
YOLOX
Paper: arxiv.org/abs/2107.08430
 Code: Megvii-BaseDetection/YOLOX
Code: Megvii-BaseDetection/YOLOX

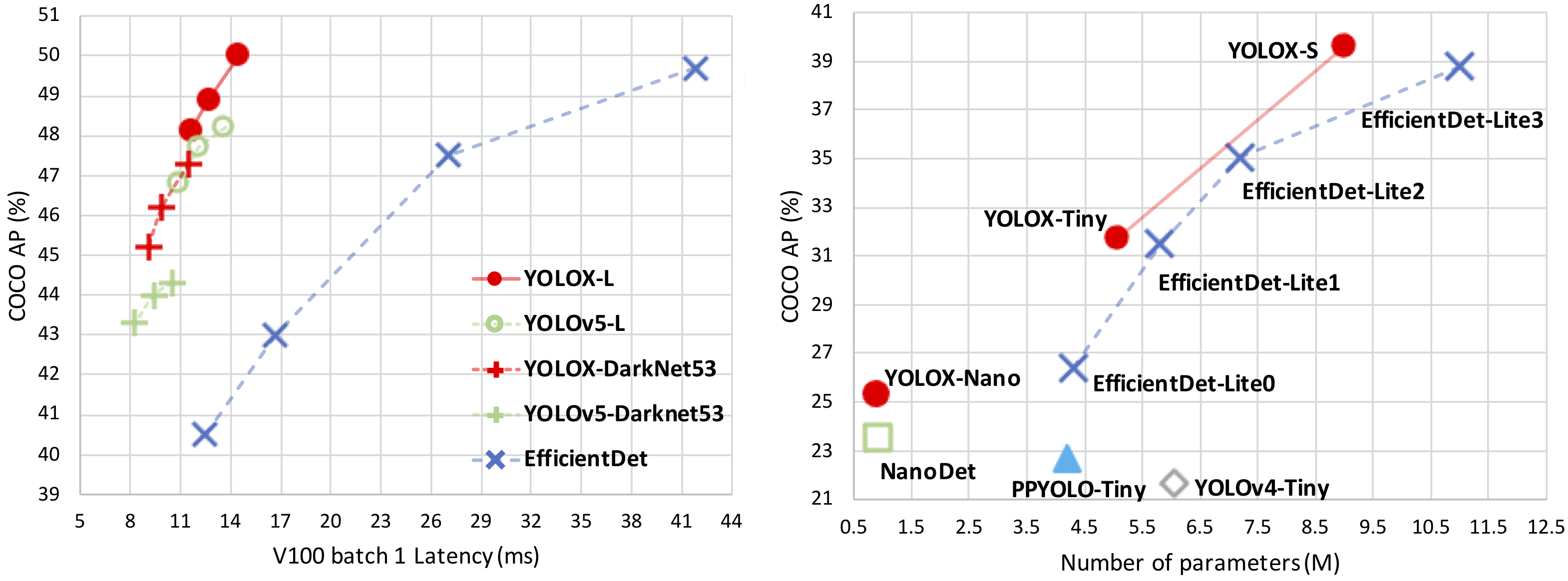
YOLOv5 vs YOLOX
Paper: Evaluation of YOLO Models with Sliced Inference for Small Object Detection

CSL-YOLO
Paper: arxiv.org/abs/2107.04829
Code: D0352276/CSL-YOLO
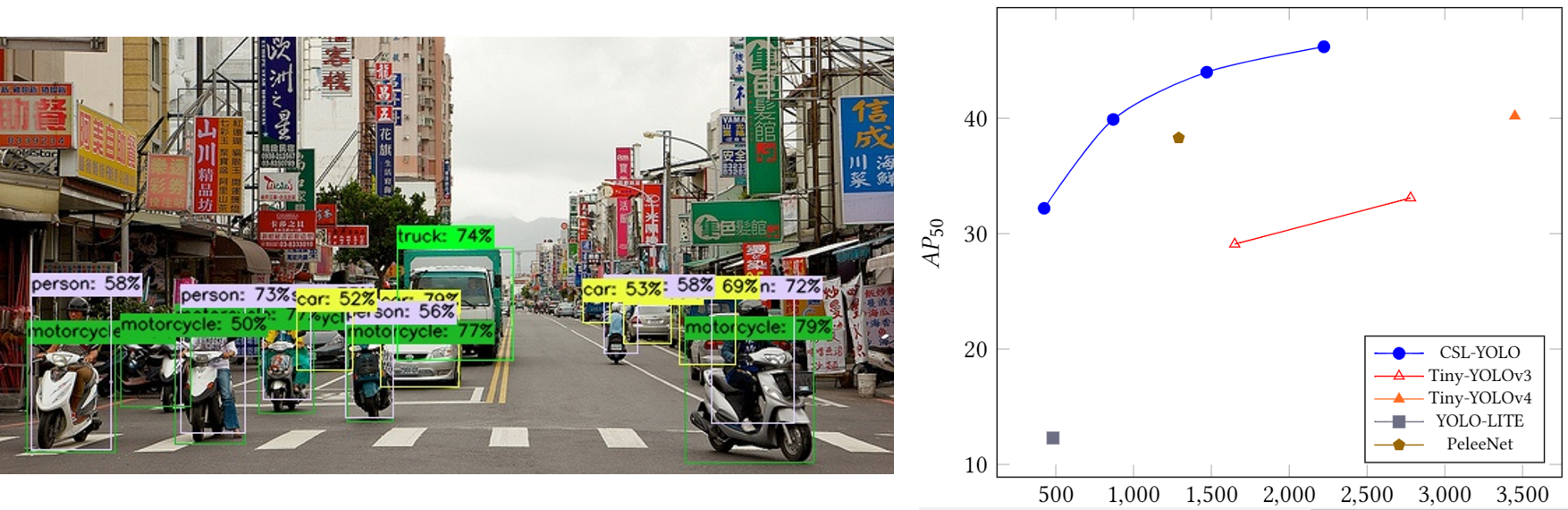 Camera Demo
Camera Demo

PP-YOLOE
Paper: PP-YOLOE: An evolved version of YOLO
 Code: PaddleDetection
Code: PaddleDetection
 Kaggle: rkuo2000/pp-yoloe
Kaggle: rkuo2000/pp-yoloe

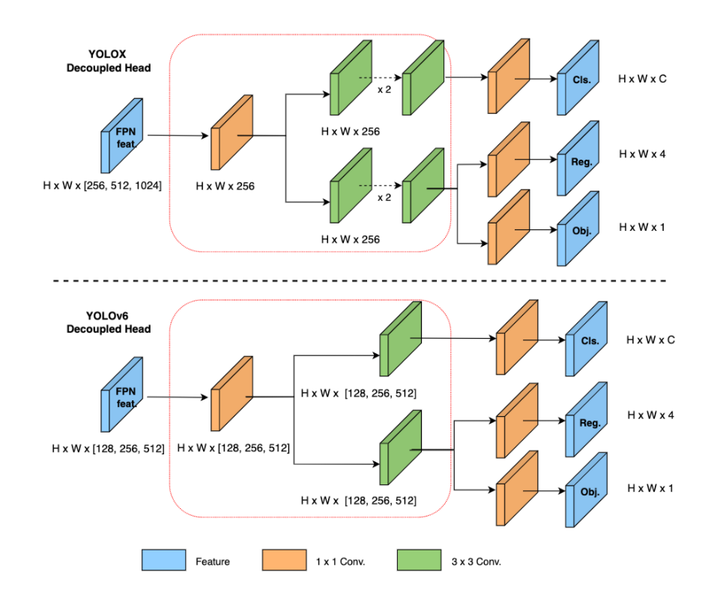
YOLOv6
Blog: YOLOv6:又快又准的目标检测框架开源啦
- RegVGG是一種簡單又强力的CNN結構,在訓練時使用了性能高的多分支模型,而在推理時使用了速度快、省内存的單路模型,也是更具備速度和精度的均衡。

- EfficientRep將在backbone中stride=2的卷積層换成了stride=2的RepConv層。並且也將CSP-Block修改為RepBlock

- 同樣為了降低在硬體上的延遲,在Neck上的特徵融合結構中也引入了Rep結構。在Neck中使用的是Rep-PAN。

- 和YOLOX一樣,YOLOv6也對檢測頭近行了解耦,分開了邊框回歸與類别分類的過程。
Code: meituan/YOLOv6


YOLOv7
Paper: YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors
- Extended efficient layer aggregation networks

- Model scaling for concatenation-based models

- Planned re-parameterized convolution

- Coarse for auxiliary and fine for lead head label assigner

Code: WongKinYiu/yolov7

Trash Detection
Localize and Classify Wastes on the Streets
Paper: arxiv.org/abs/1710.11374
Model: GoogLeNet

Street Litter Detection
Code: isaychris/litter-detection-tensorflow
TACO: Trash Annotations in Context
Paper: arxiv.org/abs/2003.06875
Code: pedropro/TACO
Model: Mask R-CNN

Marine Litter Detection
Paper: arxiv.org/abs/1804.01079
Dataset: Deep-sea Debris Database

Marine Debris Detection
Ref. Detect Marine Debris from Aerial Imagery
Code: yhoztak/object_detection
Model: RetinaNet

UDD dataset
Paper: A New Dataset, Poisson GAN and AquaNet for Underwater Object Grabbing
Dataset: UDD_Official
Concretely, UDD consists of 3 categories (seacucumber, seaurchin, and scallop) with 2,227 images



Detecting Underwater Objects (DUO)
Paper: A Dataset And Benchmark Of Underwater Object Detection For Robot Picking
Dataset: DUO

Object Tracking Datasets
Paper: Deep Learning in Video Multi-Object Tracking: A Survey
Multiple Object Tracking (MOT)

Under-water Ojbect Tracking (UOT)
Paper: Underwater Object Tracking Benchmark and Dataset
UOT32
UOT100

Re3 : Real-Time Recurrent Regression Networks for Visual Tracking of Generic Objects
Paper: arxiv.org/abs/1705.06368
Code: moorejee/Re3
Deep SORT
Paper: arxiv.org/abs/1703.07402
Code: nwojke/deep_sort
Blog: Deep SORT多目标跟踪算法代码解析(上)
- Kalman Filter to create “Track”, associate track_i with incoming detection_k
- A distance metric (squared Mahalanobis distance) to quantify the association
- an efficient algorithm (standard Hungarian algorithm) to associate the data
SiamCAR
Paper: arxiv.org/abs/1911.07241
Code: ohhhyeahhh/SiamCAR


YOLOv5 + DeepSort
Code: HowieMa/DeepSORT_YOLOv5_Pytorch

Yolov5 + StrongSORT with OSNet
Code: Yolov5_StrongSORT_OSNet
 |
 |
SiamBAN
Paper: arxiv.org/abs/2003.06761
Code: hqucv/siamban
Blog: [CVPR2020][SiamBAN] Siamese Box Adaptive Network for Visual Tracking



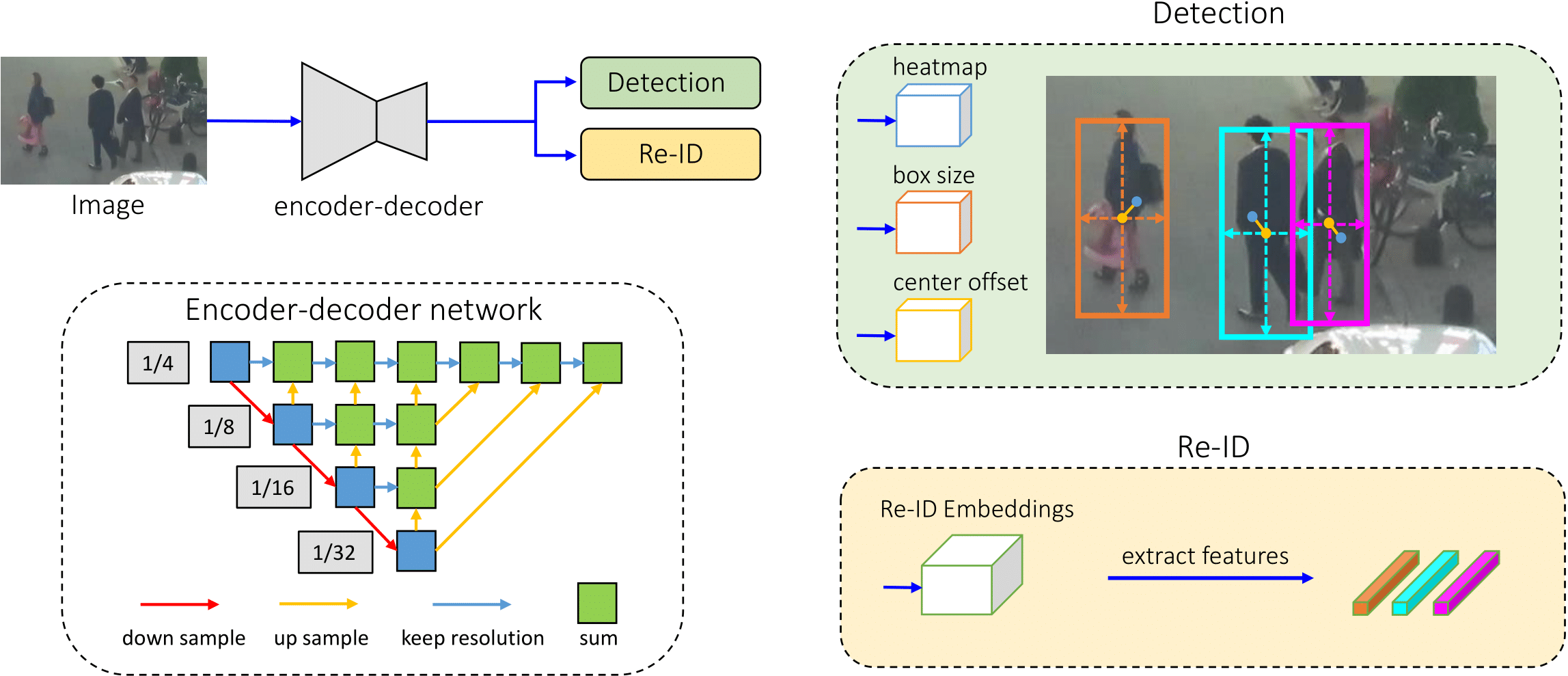
FairMOT
Paper: FairMOT: On the Fairness of Detection and Re-Identification in Multiple Object Tracking
Code: ifzhang/FairMOT
3D-ZeF
Paper: arxiv.org/abs/2006.08466
Code: mapeAAU/3D-ZeF

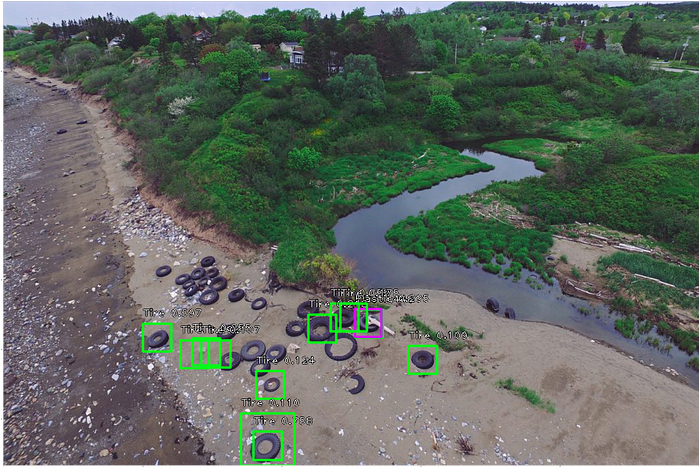
UAV-based Object Detection and Tracking
Paper: Deep Learning for UAV-based Object Detection and Tracking: A Survey
Efficient Object Detection Model for Real-Time UAV Applications
Paper: Efficient Object Detection Model for Real-Time UAV Applications
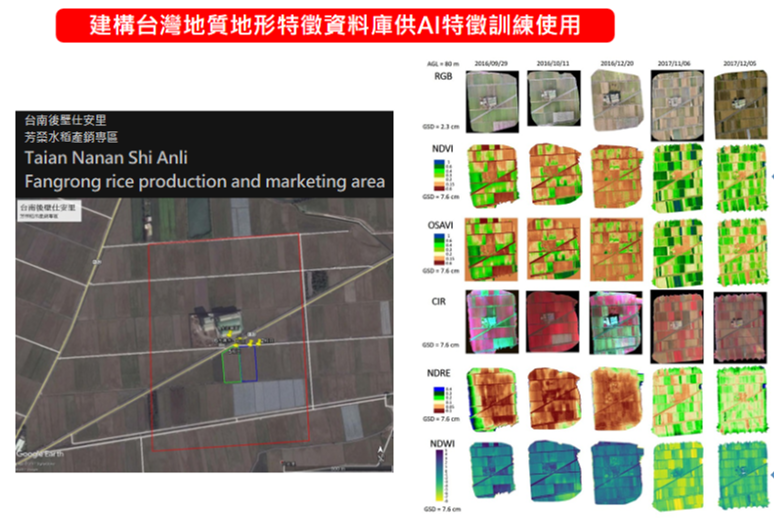
Satellite Image Deep Learning
T-CNN : Tubelets with CNN
Paper: arxiv.org/abs/1604.02532
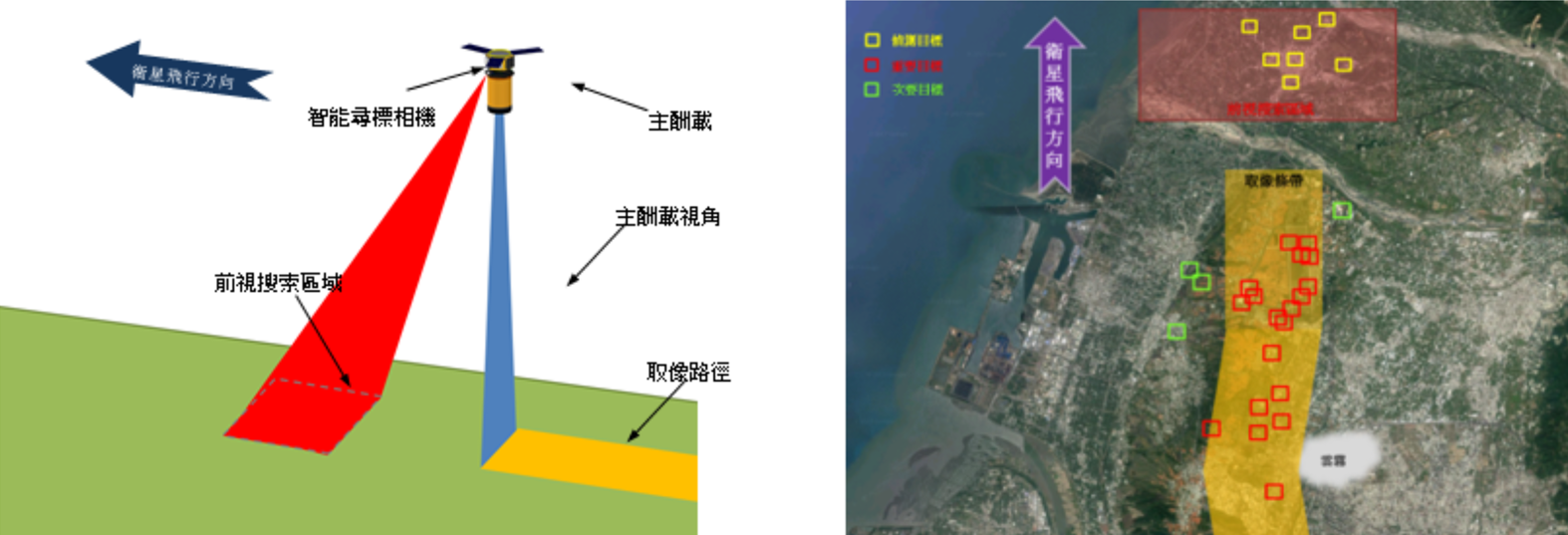
Blog: 人工智慧在太空的應用
Swimming Pool Detection
Dataset: Aerial images of swimming pools
Kaggle: Evaluation Efficientdet - Swimming Pool Detection
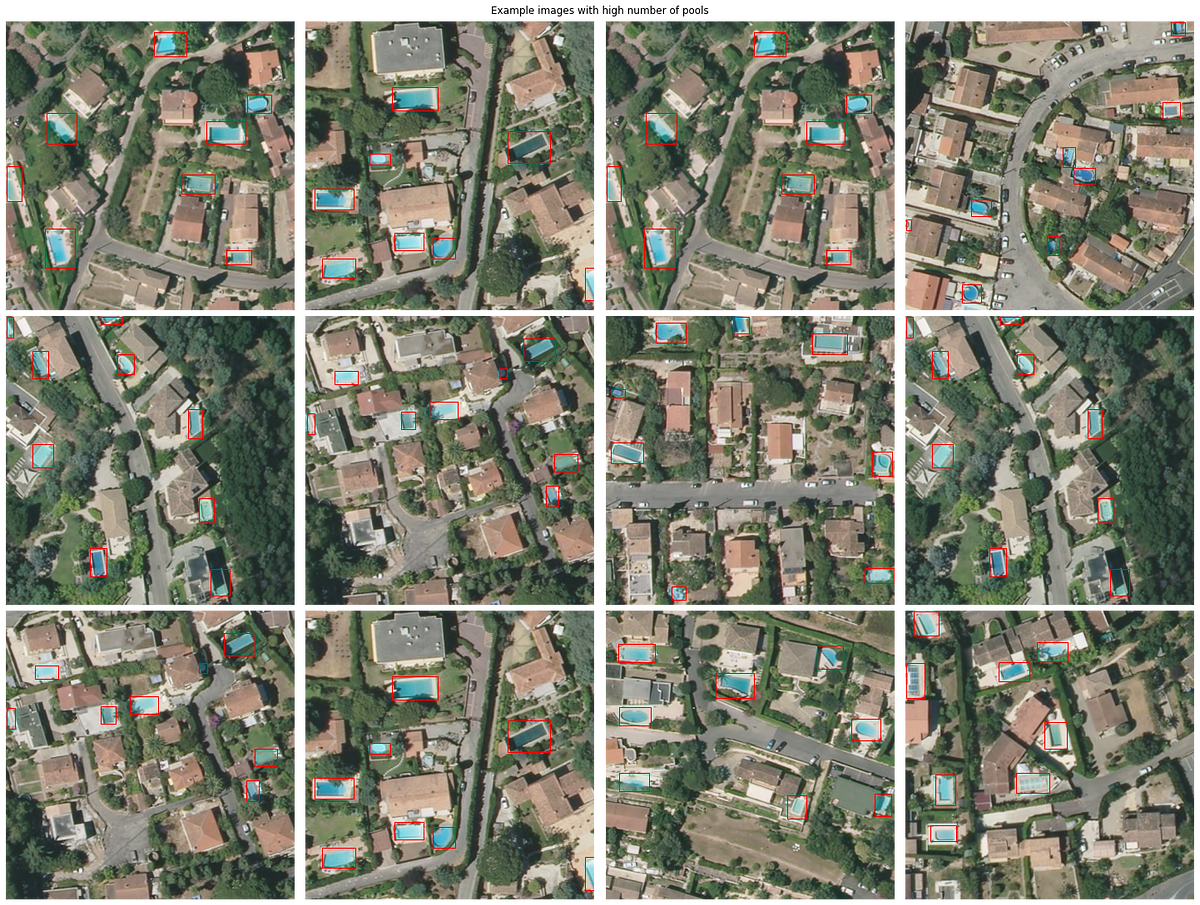
Pool-Detection
Code: https://github.com/yacine-benbaccar/Pool-Detection

Identify Military Vehicles in Satellite Imagery
Blog: Identify Military Vehicles in Satellite Imagery with TensorFlow
Dataset: Moving and Stationary Target Acquisition and Recognition (MSTAR) Dataset
 The MSTAR dataset was prdocued between 1995-1997 in a collaboration between DARPA/Air Force Research Laboratories. It contains roughly 1000 SAR images of 8 different vehicle types:
The MSTAR dataset was prdocued between 1995-1997 in a collaboration between DARPA/Air Force Research Laboratories. It contains roughly 1000 SAR images of 8 different vehicle types:
- 2S1 Gvozdika — Self-propelled artillery
- ZSU-23–4 Shilka — Self-propelled anti-aircraft
- BRDM-2 — Amphibious armored scout car
- BTR-60 — Armored personnel carrier
- D7 — Caterpillar Bulldozer
- ZIL-131 — Military cargo truck
- T-62 — Main battle tank
- T-72 — main battle tank (2nd Gen)
- SLICY — Structure acting as a ‘ground truth’ (not a vehicle)
Code: Target Recognition in Sythentic Aperture Radar Imagery Using Deep Learning
script.ipynb
Steel Defect Detection
Dataset: Severstal: Steel Defect Detection
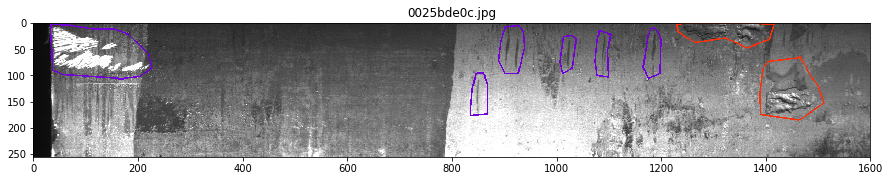
Steel Defect Detection using UNet
Kaggle: https://www.kaggle.com/code/jaysmit/u-net (Keras UNet)
Kaggle: https://www.kaggle.com/code/myominhtet/steel-defection (pytorch UNet
Steel-Defect Detection Using CNN
Code: https://github.com/himasha0421/Steel-Defect-Detection


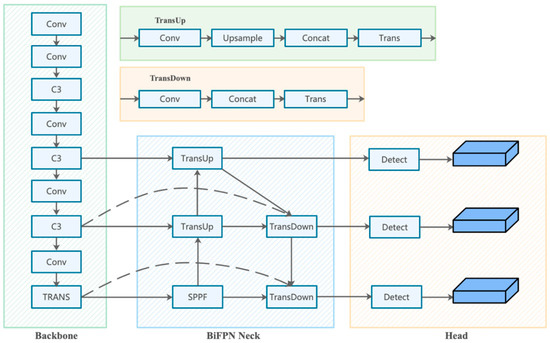
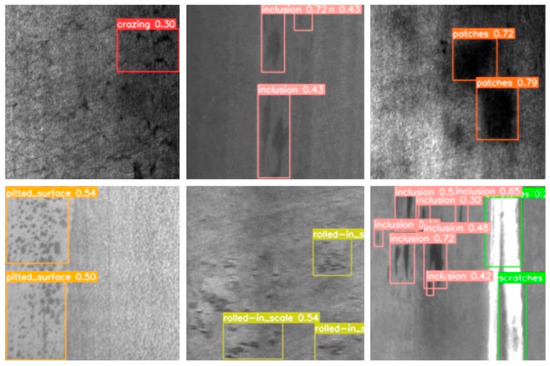
MSFT-YOLO
Paper: MSFT-YOLO: Improved YOLOv5 Based on Transformer for Detecting Defects of Steel Surface
PCB Defect Detection
PCB Datasets


PCB Defect Detection
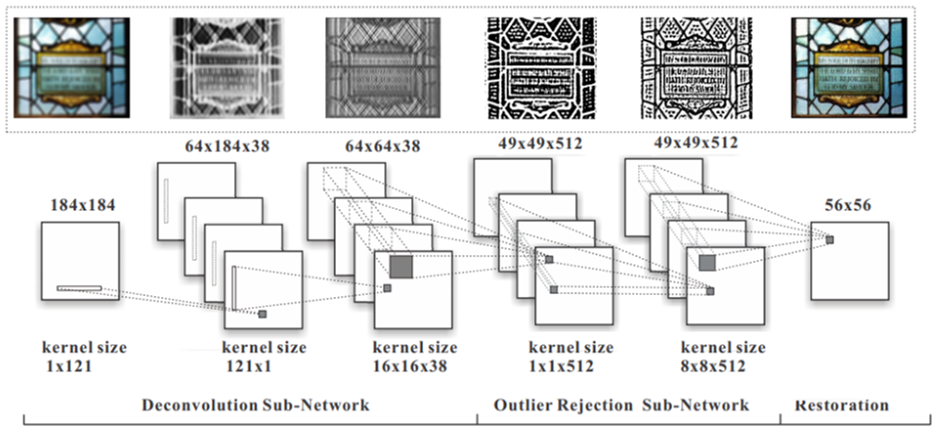
Paper: PCB Defect Detection Using Denoising Convolutional Autoencoders
PCB Defect Classification
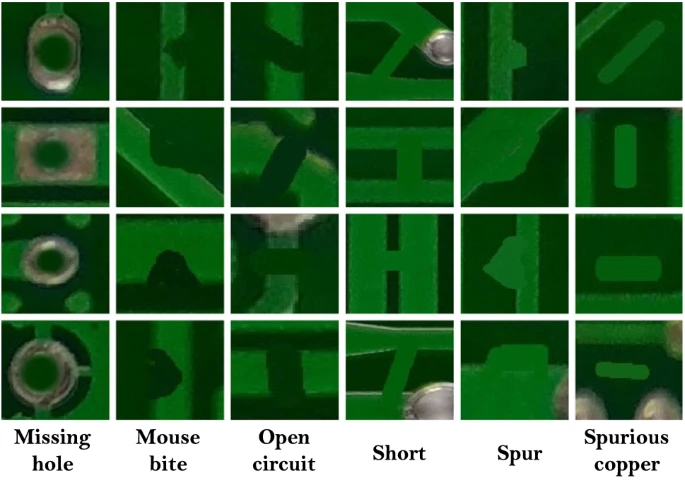
Dataset: HRIPCB dataset (dropbox)
印刷电路板(PCB)瑕疵数据集。它是一个公共合成PCB数据集,包含1386张图像,具有6种缺陷(漏孔、鼠咬、开路、短路、杂散、杂铜),用于图像检测、分类和配准任务。
Paper: End-to-end deep learning framework for printed circuit board manufacturing defect classification
This site was last updated December 22, 2022.